The global frictional contact problem defined by. More...
#include <fclib.h>
Public Attributes | |
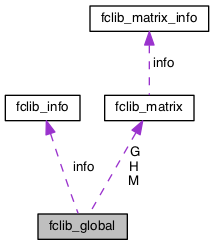
| struct fclib_matrix * | M |
| the matrix M (see mathematical description below) More... | |
| struct fclib_matrix * | H |
| the matrix M (see mathematical description below) More... | |
| struct fclib_matrix * | G |
| the matrix M (see mathematical description below) More... | |
| double * | mu |
| the vector \(\mu\) of coefficient of friction (see mathematical description below) More... | |
| double * | f |
| the vector f (see mathematical description below) More... | |
| double * | b |
| the vector b (see mathematical description below) More... | |
| double * | w |
| the vector w (see mathematical description below) More... | |
| int | spacedim |
| the dimension , 2 or 3, of the local space at contact (2d or 3d friction contact laws) More... | |
| struct fclib_info * | info |
| info on the problem More... | |
Detailed Description
The global frictional contact problem defined by.
Given
- a symmetric positive definite matrix \({M} \in {\mathrm{I\!R}}^{n \times n}\)
- a vector \( {f} \in {\mathrm{I\!R}}^n\),
- a matrix \({H} \in {\mathrm{I\!R}}^{n \times m}\)
- a matrix \({G} \in {\mathrm{I\!R}}^{n \times p}\)
- a vector \(w \in {\mathrm{I\!R}}^{m}\),
- a vector \(b \in {\mathrm{I\!R}}^{p}\),
- a vector of coefficients of friction \(\mu \in {\mathrm{I\!R}}^{n_c}\)
the Global Mixed 3DFC problem is to find four vectors \( {v} \in {\mathrm{I\!R}}^n\), \(u\in{\mathrm{I\!R}}^m\), \(r\in {\mathrm{I\!R}}^m\) and \(\lambda \in {\mathrm{I\!R}}^p\) denoted by \(\mathrm{GM3DFC}(M,H,G,w,b,\mu)\) such that
\begin{eqnarray*} \begin{cases} M v = {H} {r} + G\lambda + {f} \\ \ \ G^T v +b =0 \\ \ \ \hat u = H^T v + w +\left[ \left[\begin{array}{c} \mu \|u^\alpha_T\|\ \ 0 \ \ 0 \end{array}\right]^T, \alpha = 1 \ldots n_c \right]^T \\ \ \ C^\star_{\mu} \ni {\hat u} \perp r \in C_{\mu} \end{cases} \end{eqnarray*}
where the Coulomb friction cone for a contact \(\alpha\) is defined by
\begin{eqnarray*} \label{eq:CCC} C_{\mu^\alpha}^{\alpha} = \{r^\alpha, \|r^\alpha_T \| \leq \mu^\alpha |r^\alpha_N| \} *\end{eqnarray*}
and the set \(C^{\alpha,\star}_{\mu^\alpha}\) is its dual.
Member Data Documentation
◆ M
| struct fclib_matrix* fclib_global::M |
the matrix M (see mathematical description below)
Definition at line 198 of file fclib.h.
Referenced by compare_global_problems(), fclib_delete_global(), fclib_read_global(), fclib_write_global(), main(), random_global_problem(), random_global_solutions(), read_global_vectors(), and write_global_vectors().
◆ H
| struct fclib_matrix* fclib_global::H |
the matrix M (see mathematical description below)
Definition at line 200 of file fclib.h.
Referenced by compare_global_problems(), fclib_delete_global(), fclib_read_global(), fclib_write_global(), main(), random_global_problem(), random_global_solutions(), read_global_vectors(), and write_global_vectors().
◆ G
| struct fclib_matrix* fclib_global::G |
the matrix M (see mathematical description below)
Definition at line 202 of file fclib.h.
Referenced by compare_global_problems(), fclib_delete_global(), fclib_read_global(), fclib_write_global(), main(), random_global_problem(), random_global_solutions(), read_global_vectors(), and write_global_vectors().
◆ mu
| double* fclib_global::mu |
the vector \(\mu\) of coefficient of friction (see mathematical description below)
Definition at line 204 of file fclib.h.
Referenced by compare_global_problems(), fclib_delete_global(), random_global_problem(), read_global_vectors(), and write_global_vectors().
◆ f
| double* fclib_global::f |
the vector f (see mathematical description below)
Definition at line 206 of file fclib.h.
Referenced by compare_global_problems(), fclib_delete_global(), random_global_problem(), read_global_vectors(), and write_global_vectors().
◆ b
| double* fclib_global::b |
the vector b (see mathematical description below)
Definition at line 208 of file fclib.h.
Referenced by compare_global_problems(), fclib_delete_global(), random_global_problem(), read_global_vectors(), and write_global_vectors().
◆ w
| double* fclib_global::w |
the vector w (see mathematical description below)
Definition at line 210 of file fclib.h.
Referenced by compare_global_problems(), fclib_delete_global(), random_global_problem(), read_global_vectors(), and write_global_vectors().
◆ spacedim
| int fclib_global::spacedim |
the dimension , 2 or 3, of the local space at contact (2d or 3d friction contact laws)
Definition at line 212 of file fclib.h.
Referenced by compare_global_problems(), fclib_read_global(), fclib_write_global(), random_global_problem(), read_global_vectors(), and write_global_vectors().
◆ info
| struct fclib_info* fclib_global::info |
info on the problem
Definition at line 214 of file fclib.h.
Referenced by compare_global_problems(), fclib_delete_global(), fclib_read_global(), fclib_write_global(), and random_global_problem().

